В начале 2000-х годов роботы были почти исключительно жесткими конструкциями — металлические рамы, твёрдые шарниры, приводы, работающие по принципу рычагов. Такие машины могли выполнять простые задачи, но не имели способности к гибкости, адаптации или естественному движению. С развитием материаловедения и нанотехнологий появилась идея о мягких роботах — машинах, построенных из эластичных, гибких компонентов, способных к деформации и взаимодействию с окружающей средой, как живые организмы.
Ключевым элементом таких роботов стали искусственные мышцы. В отличие от традиционных приводов, они не требуют жёстких механизмов, а работают на основе сжатия и растяжения мягких материалов. Однако на практике их создание оставалось сложным и дорогим. Для формирования внутренних каналов, необходимых для подачи воздуха, инженеры использовали двухкомпонентное литьё: один слой — с пневматическими каналами, другой — без. После высыхания и отделения этих слоёв получалась структура, несовершенная по форме и с высокой степенью деформации.
Этот процесс был не только трудоёмким, но и неэффективным — каждый элемент требовал отдельной обработки, сборки и проверки. В итоге производство искусственных мышц становилось слишком дорогостоящим, чтобы быть доступным для широкого внедрения. Проблема заключалась не только в технических сложностях, но и в фундаментальном ограничении: невозможно было создавать сложные, многоуровневые структуры, в которых каналы и мышечная ткань были интегрированы в единый элемент.
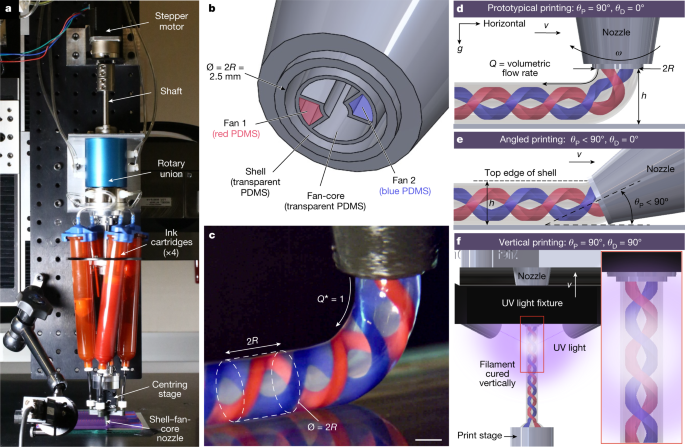
Решение появилось в Гарвардском университете, где исследователи разработали метод rotational multimaterial 3D printing. В отличие от традиционных подходов, где каждый слой печатается отдельно, новая технология позволяет одновременно формировать ткань мышцы и внутренние каналы в мягком геле. Принтер вращает слой за слоем, в процессе чего в материал вплетаются пневматические каналы — как в ткани, так и в структуре.
После завершения печати материал подвергается обработке: мягкий гель удаляется, оставляя внутри полые каналы, готовые к подаче воздуха. В результате получается мышца, которая не только сохраняет форму, но и может сжиматься и растягиваться под воздействием давления. Важно, что весь процесс происходит за один проход без необходимости сборки нескольких компонентов.
Этот подход не просто упрощает производство — он кардинально меняет подход к проектированию. Теперь инженеры могут создавать мышцы с сложной геометрией, например, с криволинейными формами, имитирующими биологические структуры. Такие мышцы могут двигаться не как механические рычаги, а как живые ткани — плавно, естественно, без резких скачков.
Результат — роботы, которые не просто выполняют задачи, а ведут себя как живые существа. Они могут изгибаться, сгибаться, подстраиваться под форму объектов, не повреждая их. Это особенно важно в медицине — например, в роботах-ассистентах для пациентов с ограниченными возможностями, где гибкость и естественность движений критичны.
В промышленности такие роботы могут работать в труднодоступных местах — например, в бетонных конструкциях, где жесткие роботы могут повредить структуру. В быту — роботы, способные убирать посуду, сгибаться под столом или поднимать тяжёлые предметы без резких движений.
Несмотря на все преимущества, технология пока ограничена по масштабам. Материалы, используемые в печати, не подходят для высоких нагрузок, а долговечность таких мышц при длительной эксплуатации требует дополнительных исследований. Также неизвестно, насколько легко можно адаптировать этот метод к другим типам роботов или к условиям, где температура и влажность сильно варьируются.
Тем не менее, внедрение rotational multimaterial 3D printing открывает путь к новому поколению роботов — не просто механизмов, а систем, которые могут воспринимать окружающую среду и реагировать на неё как живые организмы. Их движение будет плавным, адаптивным, органичным. Это не просто технический прорыв — это сдвиг в понимании того, что роботы могут быть не только инструментами, но и элементами живой экосистемы.